采用柔性自动化技术对于企业保持增长至关重要,它可以帮助企业保持多样化的产品流水线,并尽量减少与产品更换相关的停机时间。过去一个世纪以来,工业技术的进步和自动化的快速发展是前所未有的。现在,自动化已经从“固定”状态变得更加灵活(见图1)。

图1:自动化已经从刚性的、只生产一种产品的方式,向柔性、可以无缝切换生产多个产品的方式过渡。
刚性自动化(Fixed Automation)主要设计用于反复高效地生产单个产品。过去,往往只产生一种或有限种类的产品,而且产量很大、变化很小,因此这种模式在生产车间运行良好。由于前期设备成本要低于柔性解决方案,因此对这类生产活动而言,刚性自动化非常适合。如果只生产单一部件,产量就可以得到优化。但是,模块化通常不是原始设计所考虑的部分,这就意味着将机器设备转换成支持多个产品配置时,从经济方面考虑往往并不划算,因此实施比较困难。
更具可配置性
随后出现了下一代自动化——可编程自动化(Programmable Automation),旨在实现安装实施后允许某种程度的可配置性。这包括编写新的代码来执行新运营的能力,当然这需要手动操作机械装置来进行转换。缺点是,转换过程往往劳动强度大,需要较长的停机时间以便更换工具和更改编程。
更现代的方法是柔性自动化(Flexible Automation),设备操作人员按下按钮,就可以利用配方控制和机械自动化无缝地将一个进程转换到另一个。这使制造商能够在同一台机器上生产更多的产品,前提是该机器的设计具有生产其它产品的能力。柔性设备采用机电自动化,将快速、可重复的过程转换为位置控制。这允许生产线生产各种各样的产品,而停机时间却很短 (见图 2)。
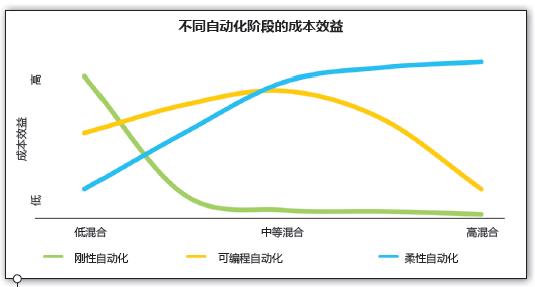
图2:该图显示了3个自动化阶段在成本效益方面的关系。水平轴显示的是从较低混合到较高混合产品线上的变动水平。垂直轴则是成本效益。
从成本效益的角度来看,一旦刚性自动化系统中的任何产品出现变化,该系统就变得极低效。相反,在柔性自动化系统中,随着产品组合的增加,一旦制定了合适的组合,就可以获得最优的解决方案,因此柔性自动化则变得更具成本效益。
工业物联网的推动
访问设备信息和数据管理技术的快速发展,为柔性自动化创造了无限的可能性。世界变得越来越小,节奏也比十年前更快了。信息源源不断的出现,可供机器使用,也可供人与之进行交互。机器人技术在行业中的影响也不容忽视。所有这些因素,为柔性自动化的蓬勃发展提供了一个良好的环境。
工业物联网 (IIoT)也在柔性自动化中扮演了重要角色。IIoT描述了嵌入软件和传感器的电子设备网络,可以源源不断的提供信息,用于改进柔性自动化。收集这些数据的传感器可以被几乎任何机器(或人员)远程访问。将这些数据用于工厂车间的实时调整有助于最大限度地提高效率。
工业4.0的概念,最早源于欧洲,旨在鼓励制造商开发更智能的自动化工厂——可以对工厂车间的变化动态进行独立思考和应对,同时也推动了柔性自动化的发展。在工业4.0致力于打造的智能工厂中,被编程好的自动化设备能自主工作,极少需要人工干预。

图3:在多轴配置中,典型的笛卡尔或龙门解决方案尤其具有经济性。线性工作台一般可以实现较高的负载和准确度,但与机器人手臂相比需要更大的占地面积。
那些允许快速重新调整和部署机械自动化的协作机器人,也会对柔性自动化系统的设计产生影响。顾名思义,协同机器人能够与人们一起工作,以不会出现安全风险的方式执行各种任务。例如,协作机器人可以从印刷机中移除零件,并执行通常由人执行的整理操作,而不需要相同的机器防护等级。
另外,随着制造业不断向高混合、小批量生产方式转变,企业在产量最大化和减少生产设备的停机时间方面也更为关注。所有这些外部影响相互融合,创造出一种促进柔性自动化快速发展的环境。
先进的自动化技术
良好的外部环境为柔性自动化的发展铺平了道路,除此之外,现有自动化技术的持续发展也为其打开了新的大门。例如,可编程自动化控制器 (PAC) 已将运动控制和设备控制整合到同一个平台中。这些控制器通过伺服驱动,同时支持整体的设备管理和具体的协调运动。
与传统的流体动力相比,机电驱动允许更灵活的定位,以适应新的产品尺寸和过程变化。可以创建特定运动配置文件,以满足生产线上特定产品的需求。要实现柔性自动化的价值,系统必须能够快速、无缝的在不同产品设置之间切换。要做到这一点,驱动器必须具有能够在可用的空间内响应各种决策的能力。
随着机器设备制造商不断被要求满足特定的应用需求,组件规模也变得更具挑战性。过去,为适应速度、有效负载或推力的变化,可能需要通过从一台机器到另一台机器选择不同的自动化组件系列来解决。此外,选择可靠的组件以防止过早的失效也非常重要。
满足更广泛应用的需求
在柔性自动化方面,机器设计人员面临着诸多的挑战,机电元件和机器设备制造商们可以做哪些工作来应对这些挑战呢?设计可扩展和可配置的产品平台是一个好方法,这有助于帮助企业解决更广泛的应用需求。
可扩展的机械台设计,旨在解决应用需求中的可变部分,例如功能、速度、 行程长度、负载变动和瞬时负载、推力和精度等。许多自动化平台,如铰接式机械臂,都可以用来提供这种水平的灵活性。传统的机器人手臂,则主要用于“固定”的工厂车间内单一产品的生产。然而,随着协同机器人的出现,重新部署铰接式机械臂变得更容易了。线性机械台可以部署在单轴或多轴方向,提供了更多的灵活性。
单轴工作台有较高的性价比,但在多轴配置中,通常是笛卡尔或龙门解决方案具有更高的成本效益。线性工作台通常可以实现更高的有效载荷和精度,但与机器人手臂相比,需要更大的占地面积(见图3)。
诸如人机界面(HMI)之类的触摸屏可实现配方控制,以及从一个进程到另一个进程的即时调整。这些屏幕可以用特定的按钮和报警进行预编程,允许操作员预览系统更改,选择合适的配方以便实现设备的切换,以适应不同的产品和过程。通过HMI进行菜单控制可简化更改行程和运动配置文件,以适应多种包装尺寸。
无疑,会有更多新的技术突破不断涌现,以支持向柔性自动化的转变。一些尚未部署的先进技术,或将成为推动刚性自动化和可编程自动化转变的关键因素。所有这些技术,与不断增加的信息流和不断减少的停机时间一起,将继续为柔性自动化时代的发展奠定基础。(作者:Jeremy Miller)